 J. Sun and J. Zhao
J. Sun and J. Zhao
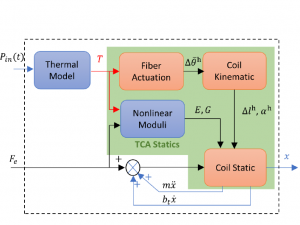
Physics-based Modeling of Twisted-and-Coiled Actuators Using Cosserat Rod Theory
IEEE Transactions on Robotics, In press, 2022.
Link | PDF | Video
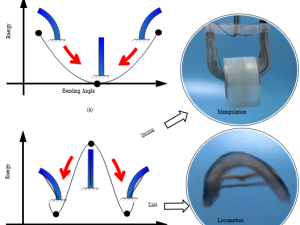
 H. Zhang, E. Lerner, B. Cheng, andJ. Zhao,
H. Zhang, E. Lerner, B. Cheng, andJ. Zhao,
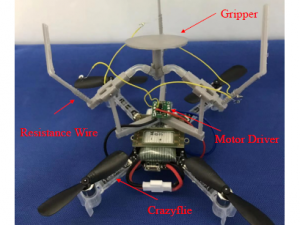
Compliant Bistable Grippers Enable Passive Perchingfor Micro Aerial Vehicles,
IEEE/ASME Transactions on Mechatronics, vol. 26, no. 5, pp.2316-2326, 2021.
Link | PDF | Video
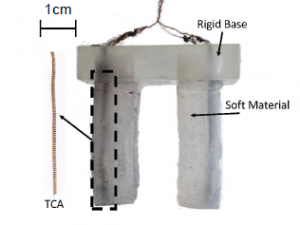
 J. Sun, B. Tighe, Y. Liu, and J. Zhao
J. Sun, B. Tighe, Y. Liu, and J. Zhao
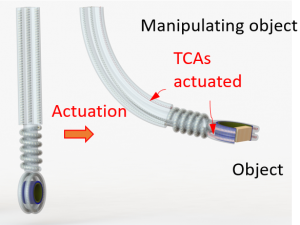
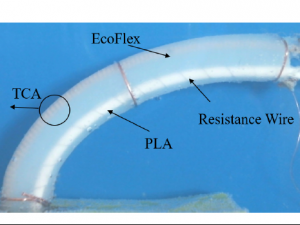
Twisted-and-Coiled Actuators with Free Strokes Enable Soft Robots with Programmable Motions
Soft Robotics, vol. 8, no. 2, 2021.
Link | PDF | Video
 Y. Tang, Y. Chi, J. Sun, T. Huang, O. H. Maghsoudi, A. Spence, J. Zhao, H. Su, J. Yin
Y. Tang, Y. Chi, J. Sun, T. Huang, O. H. Maghsoudi, A. Spence, J. Zhao, H. Su, J. Yin
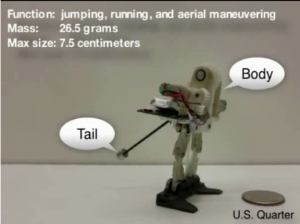
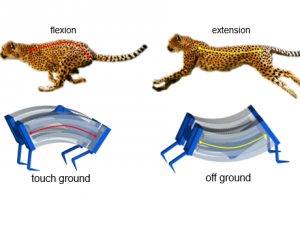
Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots
Science Advances, vol. 6, no. 19, pp. eaaz6912, 2020.
Link | PDF | Video
J. Sun, B. Tighe, and J. Zhao
Tuning the Energy Landscape of Soft Robots for Fast and StrongMotion
IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 10082-10088.
Link | PDF | Video
 B. Pawlowski, J. Sun, J. Xu, Y. Liu, and J. Zhao
B. Pawlowski, J. Sun, J. Xu, Y. Liu, and J. Zhao
Modeling of Soft Robots Actuated by Twisted-and-Coiled Actuators
IEEE/ASME Transactions on Mechatronics, vol. 24, no. 1, pp. 5-15,2019.
Link | PDF
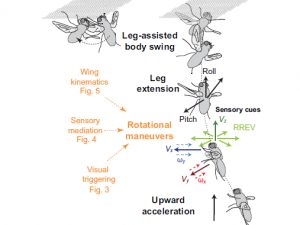 P. Liu, S. P. Sane, J.-M. Mongeau, J. Zhao, and B. Cheng
P. Liu, S. P. Sane, J.-M. Mongeau, J. Zhao, and B. Cheng
Flies land upside down on a ceiling using rapid visually-mediated rotational maneuvers
Science Advances, vol. 5, no. 10, pp. eaax1877, 2019.
Link | PDF
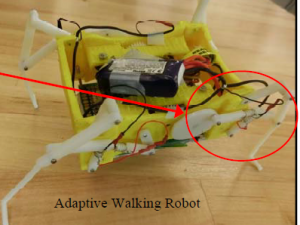 J. Sun and J. Zhao
J. Sun and J. Zhao
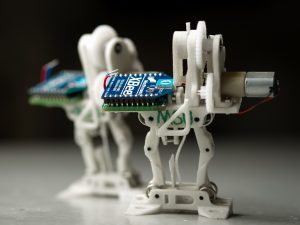
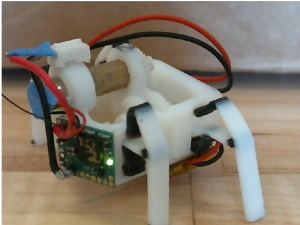
An Adaptive Walking Robot with Reconfigurable Mechanisms using ShapeMorphing Joints
IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 724 – 731, 2019.
Link | PDF | Video
 H. Zhang, B. Cheng, and J. Zhao
H. Zhang, B. Cheng, and J. Zhao
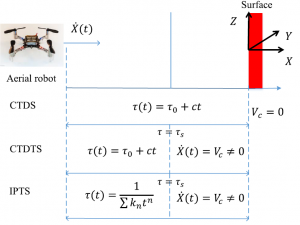
Optimal trajectory generation for time-to-contact based aerial robotic perching
Bioinspiration and Biomimetics, vol. 14, no. 1, p. 016008, 2019.
Link | PDF
 H. Zhang, J. Sun, and J. Zhao
H. Zhang, J. Sun, and J. Zhao
Compliant Bistable Gripper for Aerial Perching and Grasping,
IEEE International Conference on Robotics and Automation (ICRA), 2019, pp. 1248-1253.
Link | PDF | Video
 A. DeMario and J. Zhao
A. DeMario and J. Zhao
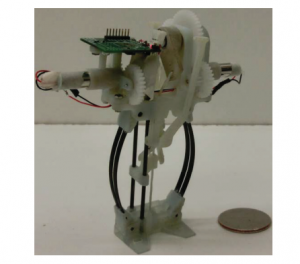
Development and Analysis of a 3D-Printed Miniature Walking Robot with Soft Joints and Links
ASME Journal of Mechanisms and Robotics, vol. 10, no. 4, pp. 041005
Link | PDF | Video
 J. Sun, B. Pawlowski, and J. Zhao
J. Sun, B. Pawlowski, and J. Zhao
Embedded and Controllable Shape Morphing with Twisted-and-Coiled Actuators
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 5912-5917. (Finalist for the best student paper award)
Link | PDF | Video
H. Zhang and J. Zhao
Bio-inspired Vision-Based Robot Control Using Featureless Estimations of Time-to-Contact
Bioinspiration and Biomimetics. vol. 12, no. 2, pp. 025001, 2017.
Link | PDF
A. Abbas and J. Zhao
A Physics Based Model for Coiled and Twisted Actuator
IEEE International Conference on Robotics and Automation (ICRA), 2017, pp. 6121–6126.
Link | PDF