Assignment #2 Read
Chapter 4
1.
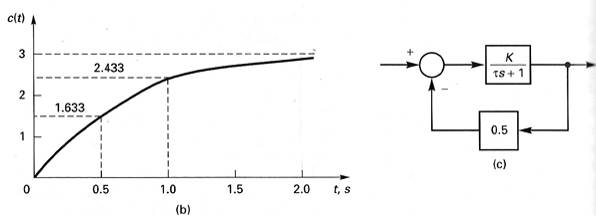
A closed loop first-order system and its unit step response are shown
below. Find parameters K and t
.
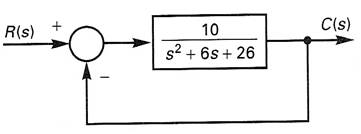
2. (a) For the
system shown below, sketch the unit step response of the system without
mathematically solving the time response c(t).
Indicate approximate
numerical values on both the amplitude axis and the time axis.
(b) Run SIMULINK simulation of exactly this
system, and compare the results to those in (a).
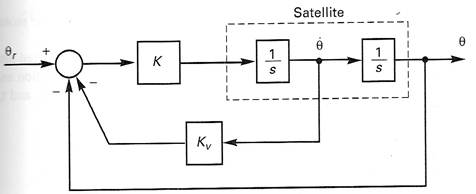
3. Shown below is a satellite
attitude control system. The model
is developed in Chapter 2 of the text.
The moment of inertia, J, has been normalized to unity.
(a)
Write the system transfer function for this attitude control system.
(b) The system is commanded to assume an
attitude of 10o [qr(t) = 10u(t)]. After transients die out (steady
state), what is the attitude angle qss(t) ?
(c) The closed loop system is to respond to
a step input in minimum time with no overshoot, which requires that
z = 1. Find Kv as
a function of K such that this
specification is satisfied.
(d) The system is to reach steady state approximately
6 sec after a command to change the attitude angle.
Find a value of K that
satisfies this spec.
(e) Verify the results of (b) thru (d) above
with a MATLAB simulation.
4. For
the satellite control system above,
(a)
Find the close-loop transfer function
(b) Find the closed-loop dc gain
(c) If Kv = 0, find the closed loop system gain (magnitude of frequency
response) at resonance
(d) Design specifications of the system are
that the peak closed-loop gain cannot be greater than 1.25 and
that the system time constant t = 1sec.
Design the system by finding K
and Kv
such that the
specifications are satisfied. Note that the damping of the system has
been increased by velocity
(rate or derivative) feedback.