Assignment #1 Read
Appendix B and Chapter 1
1. Using the defining
integral of the Laplace transform, derive the Laplace transform of:
(a) f(t) = u(t-4)
(b) x(t) =
exp(-4t)u(t-2)
2. Using the Laplace
transform tables, find the Laplace transform of:
(a) f(t) =
-4texp(-3t)u(t)
(b) g(t) =
2tcos(3t)u(t)
(c) x(t) = 5cos(3t+30o)u(t)
3. Find the inverse Laplace
transform of:
(a) F(s) = 5/((s(s+1)(s+3))
(b) G(s) = (2s+1)/(s2+2s+10)
(c) H(s) = (s-30)/((s(s2+4s+29))
(d) X(s) = 2/(s2(s+1))
4. For
each function of question 3 above,
(a)
Which inverse Laplace transforms do not have final values?
(b) Find the final values for those
functions that have one.
5. Given the differential
equation: x´´(t)+ 5x´(t)+4x(t) = 3u(t) where ´ indicates
differentiation with respect to t,
(a) Find x(t) for
the case that all initial conditions are zero.
(b) Find x(t) for
the case that x(0) = x´(0) = 1 Show that your solution yields the
correct initial conditions.
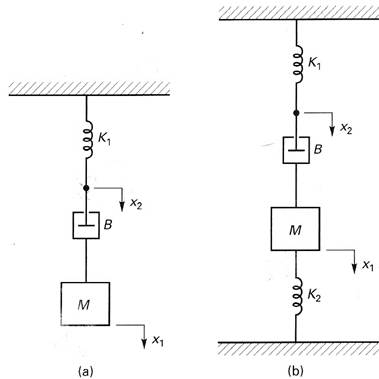
6. (a) Write the differential equation for the
mechanical system (a) below. There
are no applied forces.
(b) A force f(t) is
applied downward to mass M. Find
the transfer function from the applied force to the displacement, x1(t),
of the Mass, X1(s)/F(s) .
(c) Repeat (a) for the system (b) below.
(d) A force f(t) is
applied downward to the mass M in (b).
Find the transfer function X1(s)/F(s) .
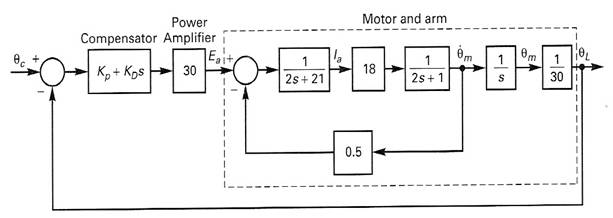
7. Shown below is the block
diagram of the servo-control system for one of the joints of a robot.
(a) Find the plant transfer function qL(s)/Ea(s) .
(b) Find the closed loop system transfer
function qL(s)/ qc(s) .
(c) Find the transfer function from the
system input qc(s) to the motor
armature voltage Ea(s) for the closed loop system.
PLEASE NOTE: All assignments are due by 4:00 pm on the due date in to the drop box in the B-C Infill